
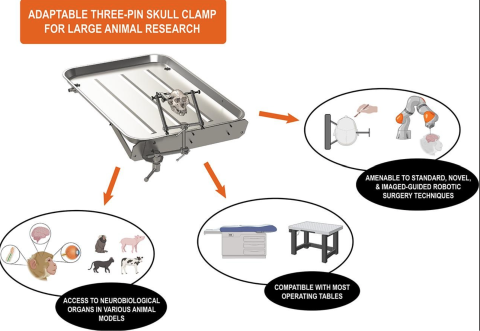
Maxwell (Max) Lohss and Jonathan Ho, two third-year medical students in the PSTP, recently published an article titled Adaptable three-pin skull clamp for large animal research in the open-source engineering journal HardwareX. They designed, built, and tested a mechanical system for researchers to perform existing and novel surgical approaches on non-human primates. For the first time ever, their system allows researchers to position a non-human primate in nearly any anatomical position, improving surgical access and providing new opportunities for groups to implement image-guided robotic surgery techniques. The paper provides detailed instructions for other laboratories to recreate and use their surgical system as an affordable, user-friendly research platform.